지능형 내비게이션 및 제어 : 바람과 파도 조건에서 자율 경로 계획 및 안정적인 작동을 지원합니다.
추적 기록 및 경로 복귀 : 탐색 경로를 자동으로 기록하여 경로 따라 복귀 및 역추적을 가능하게 합니다.
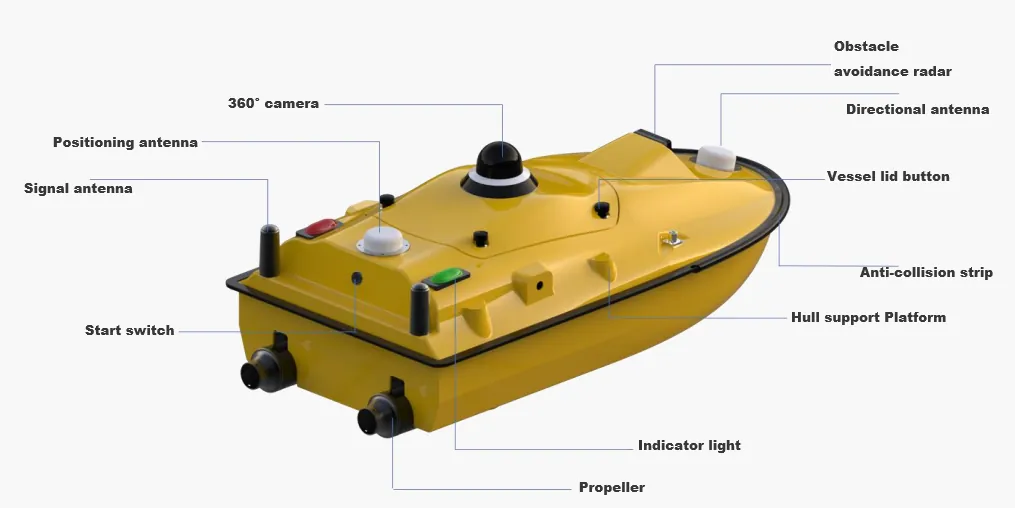
장애물 회피 : 레이더와 카메라를 활용하여 장애물 감지 및 자율 회피를 수행합니다.
스테이션 유지 기능 : 추진력을 조정하여 흐르는 물에서 위치를 유지하므로 고정점 작업에 이상적입니다.
GIS 매핑을 통한 AI 대상 인식 : 온보드 AI 모듈은 특정 대상을 식별하고 지리 참조 인식 데이터를 GIS 관리 플랫폼과 실시간으로 동기화합니다.
인체공학적 리모컨 : 안정적인 현장 작동을 위해 보호 케이스, 이중 팬 냉각 및 낙하 방지 소재를 갖춘 휴대용 디자인입니다.
견고한 인터페이스 : 모든 외부 포트는 먼지로부터 보호되어 열악한 환경에서도 안정적인 성능을 보장합니다.
◀◀ 적용시나리오 ▶▶
수로 및 지형 측량
하천 단면 측정
저수지 용량 평가
수중 지형 및 형태 매핑
단일 빔, 다중 빔 및 사이드 스캔 소나와 호환 가능
비상작전
신속한 수중 물체 검색
긴급조사, 순찰, 모니터링
수질 오염 감지 및 샘플링
물환경 모니터링
다중 매개변수 수질 모니터링
실시간 수질조사(transect profiling)
물 샘플링 및 분석
숨겨진 배수구 및 배수구 감지

지금 저희에게 연락하십시오 ! 귀하의 프로젝트에 대해 자세히 알아보려면











































































